VNATECH bàn giao hệ thống Robot di động kết hợp cánh tay robot (Cobot) cho khoa Cơ Khí – Bộ môn Cơ Điện Tử trường Đại Học Công Nghiệp Hà Nội.
VNATECH chạy thử và bàn giao hệ thống robot di động công nghệ SLAM và robot cộng tác Cobot cho trường Đại Học Công Nghiệp Hà Nội
Xuất phát từ yêu cầu bài toán: Xây dựng hệ robot tích hợp giữa robot di động và cánh tay robot cộng tác Cobot phục vụ đào tạo lập trình các tác vụ công nghệ cao, tự động hoá hoàn toàn ứng dụng trong sản xuất công nghiệp hiện đại và xu thế áp dụng cho các nhà máy thông minh trong tương lai.
VNATECH Design & Build từ lên giải pháp, thiết kế, lắp ráp, lập trình, chạy thử và bàn giao hệ robot di động kết hợp cobot hoàn thiện đến tay khách hàng.
Thông số kỹ thuật cơ bản robot di động công nghệ SLAM và robot cộng tác Cobot
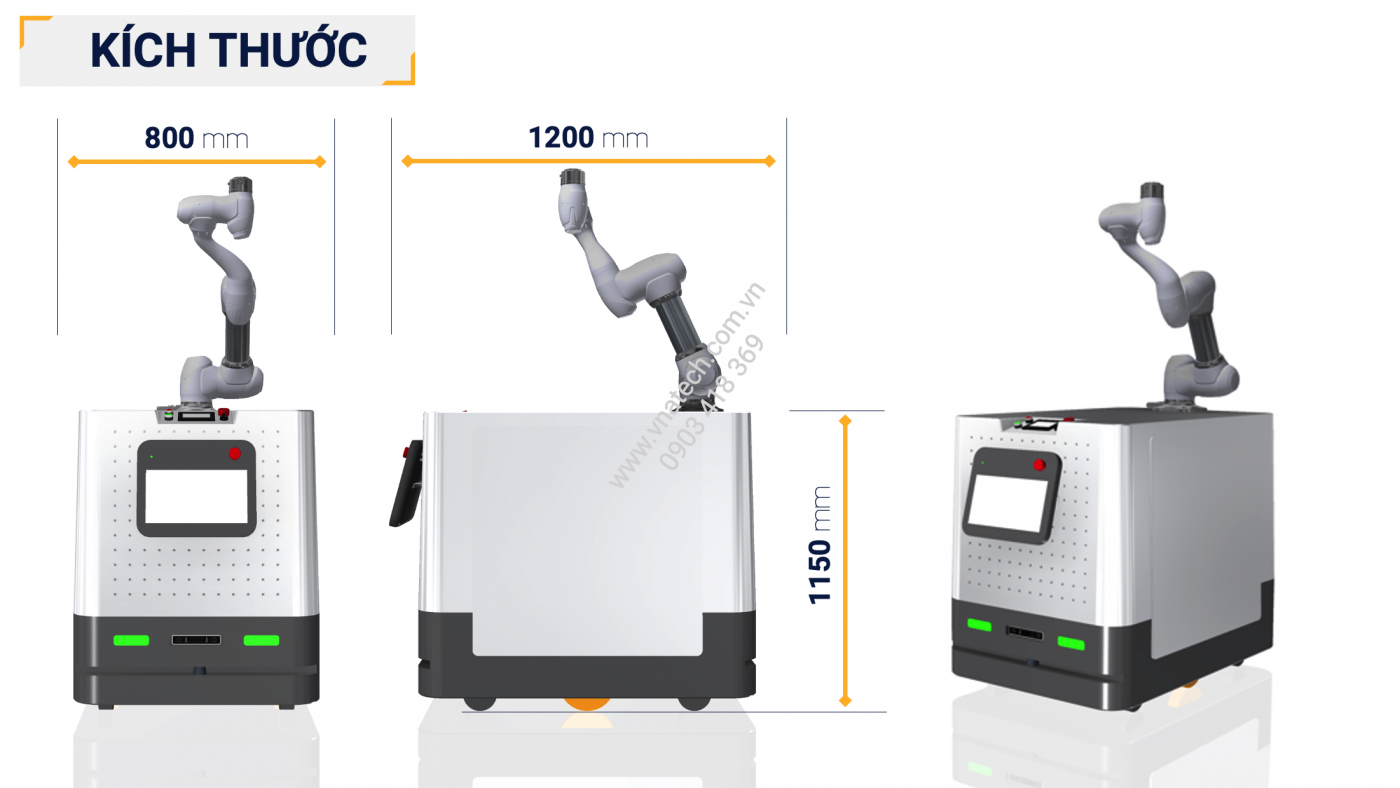
Kích thước:
Chiều dài.
1200 mm
Chiều rộng
800 mm
Chiều cao
1150 mm
Khoảng sáng gầm AGV
30 mm
Trọng lượng(Không tải)
150-180 Kg
Tốc độ và hiệu suất:
Thời gian hoạt động(Không tải)
8h
Tốc độ tối đa
0.8m/s
Bán kính góc quay
650 mm
Độ chính xác trung bình
±50 mm
Hướng di chuyển
Tiến, Quay
Phương pháp lái
2 bánh độc lập
Khoảng cách phát hiện vật cản
2m
Phương pháp dẫn đường
Hệ thống định vị không line, 3D camera
Pin
Điện áp hoạt động
24VDC
Thời gian sạc(Sau khi xả hoàn toàn pin)
3.5h
Dung lượng
29.6Ah
Phương pháp sạc
Bằng tay/Tự động
Kết nối dữ liệu
Chuẩn kết nối.
LoRa/Zigbee/Wifi
Tính năng cơ bản hệ robot di động AMR và robot cộng tác Cobot
Tính năng di chuyển:
AGV di chuyển theo quỹ đạo đã được lập trình sẵn, dựa vào phương pháp dẫn đường thông minh không line, AGV di chuyển khoa học đi đến các điểm được chọn làm việc, thao tác, thực hiện các chức năng tại điểm được chọn.
Cảm biến an toàn:
AGV được trang bị 2 lớp cảm biến an toàn bao gồm cảm biến an toàn không tiếp xúc và cảm biến an toàn tiếp xúc.
– Cảm biến an toàn không tiếp xúc: Phát hiện vật cản từ xa( Có thể điều chỉnh khoảng phát hiện) trên đường di chuyển và đưa ra cảnh báo.
– Cảm biến an toàn tiếp xúc: Đảm bảo AGV khi gặp va chạm sẽ dừng ngay lập tức.
Màn hình HMI:
Màn hình cảm ứng HMI được lập trình cho phép người dùng thao tác cài đặt các tham số, điều khiển, giám sát, hiển thị, theo dõi trạng thái AGV trong quá trình hoạt động.
Nút nhấn:
Hệ nút nhấn được lắp đặt trên AGV giúp thao tác dễ dàng, nút nhấn dừng khẩn cấp được sử dụng trong trường hợp khẩn cấp cần dừng tất cả các chuyển động của AGV.
Khung cơ khí và hệ chuyển động:
– Khung cơ khí gia công cnc chính xác, các chi tiết được sơn tĩnh điện hoặc mạ kẽm chống ô xi hóa.
– Hệ chuyển động sử dụng động cơ BLDC 24VDC, bánh xe thiết kế bám đường tốt, chống trượt trên nhiều bề mặt.
Video test robot di động mang cánh tay robot di chuyển nhờ công nghệ dẫn đường Lidar/ Slam: